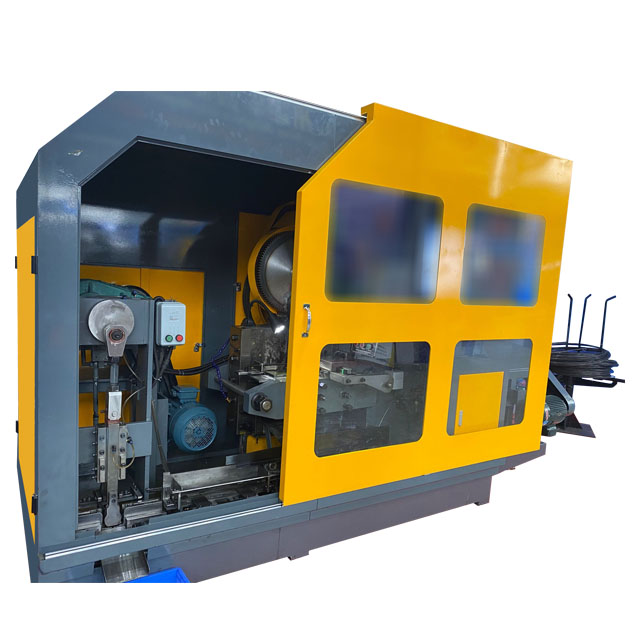




A máquina de classificação óptica de porca de quatro garras do Ronen® usa câmeras para inspecionar as porcas de quatro garras. Ele detecta questões como garras dobradas ou fios irregulares e depois distingue entre nozes boas e ruins. Quando as porcas são derramadas na máquina, ela classifica automaticamente e as coloca em caixas.
A máquina de classificação óptica de porca de quatro garras é projetada especificamente para classificar porcas de quatro garras por especificações. O equipamento é projetado especificamente para sua estrutura. Várias câmeras são usadas para capturar imagens de diferentes ângulos, permitindo que a curvatura e o espaçamento sejam vistos claramente.
A máquina de classificação óptica de porca de quatro garras foi projetada para identificar e separar automaticamente as porcas de quatro garras. Esta máquina de classificação é capaz de lidar com a forma geométrica exclusiva dessas nozes: uma base quadrada com quatro garras de metal do tipo mola, usadas para instalação em equipamentos de estrutura. A máquina de classificação classifica essas nozes junto com outros componentes e as categoriza por tamanho e tipo.
A máquina emprega um alimentador de tigela vibratória personalizada. Este alimentador está equipado com uma pista e ferramentas orientadoras, que sempre podem manter cada porca na posição correta. Geralmente, a base quadrada é colocada plana com as garras voltadas para cima, permitindo que o sistema da câmera obtenha imagens confiáveis.
A máquina de classificação óptica de porca de quatro garras usa câmeras de alta resolução para capturar imagens de cada porca. O software analisa vários recursos: o tamanho da base quadrada, a presença e o alinhamento das quatro garras, o tamanho dos orifícios da rosca e a integridade estrutural geral. O processo de análise é concluído em alguns milissegundos, à medida que a porca passa abaixo da câmera.
| Item | PS-1100 | PSL-1300 | PSG-1300 | PSG-2300 |
| Diâmetro do fio (mm) | Ø3.0-Ø8.0 |
Ø8.0-Ø16.0 |
Ø1.2-Ø3.0 |
Ø8-Ø20 |
| Largura da cabeça (mm) | Ø5-Ø15 |
Ø10-Ø25 |
Ø2.5-Ø8 |
Ø8-Ø35 |
| Altura da cabeça (mm) | 2-10 | 2-25 | 0,5-7 | - |
| Comprimento sob a cabeça (mm) | 5-70 | 15-120 | 1.5-12 | - |
| Classificação de precisão (mm) | ± 0,03 | ± 0,03 |
± 0,03 |
± 0,03 |
| Velocidade de classificação (PCS/min) | 100-600 | 100-400 | 100-900 | 100-600 |
| Pressão do ar (kg/cm³) | 5 | |||
| Computador | Computador industrial | |||
| Câmera digital | Basler | Basler |
Basler |
Basler |
| Líquido/peso bruto (kg) | 800/1141 | 950/1351 | 785/1026 | 685/963 |
| Dimensão da máquina (l*w*h) mm | 2000*2000*2100 | 2200*2200*2100 | 1900*1600*1150 | 1400*1850*2130 |
| Dimensão após a carruagem (host/local de vibração = base do computador) (l*w*h) mm |
1480*1270*2120 1580*1030*1970 |
1650*1580*2120 1800*1100*1970 |
950*1430*2240 | 2240*2080*2240 |
A característica da máquina de classificação óptica de porca de quatro garras é que ela possui vários ângulos de lente. A curvatura e o espaçamento das garras, bem como os fios na parte inferior das porcas, podem ser capturados. A faixa de alimentação também é projetada especialmente, que pode manter a porca de quatro pontas sem que ela se incline ou seja manchada.